Parameter self-tuning, motor adaptive, built-in high subdivision, low vibration, low heat generation, smooth low-speed operation, medium and high-speed torque compensation, current vector control, high current efficiency, built-in acceleration and deceleration control, improving start stop smoothness, motor operation position memory, input signal differential optocoupler isolation, user customizable subdivision, overcurrent protection, overvoltage protection, automatic detection, flexible selection of pulse edge counting mode, green light indicates operation, red light indicates protection or offline.
The two-phase digital stepper driver is controlled by the latest 32-bit ARM processor. This digital driver has peripheral subdivision, current, and auxiliary function dialing, which users can freely set according to their needs. Advanced drive control algorithms are written internally to ensure precise and stable operation of the stepper motor in various speed ranges. The built-in subdivision algorithm enables the motor to run smoothly at low speeds; The medium to high speed torque compensation algorithm can maximize the torque of the motor at medium to high speeds; Parameter self-tuning algorithm, capable of adapting to various motors and maximizing motor performance; Built in smoothing algorithm can greatly improve the acceleration and deceleration performance of the motor.
GRMOT's Technical Parameters of 2-Phase Motor Drivers and Compatible Motors
| Model | Number of Phases | Current (A) | Voltage (V) | Dimensions (mm) | Match motor Flange(mm) |
| DM422 | 2-phase | 0.5~2.2 | DC(12~40) | 86*55*22 | 20/28/35/42 |
| DM542 | 2-phase | 1.0~4.2 | DC(20~50) | 111*76*33 | 42/57/60/86(86-65&86-80) |
| DM556 | 2-phase | 1.4~5.6 | DC(20~50) | 111*76*33 | 42/57/60/86(86-65&86-80) |
| DMA872S | 2-phase | 2.1~7.2 | AC(18~55)/DC(24~80) | 109*70.26.5 | 57/60/86 |
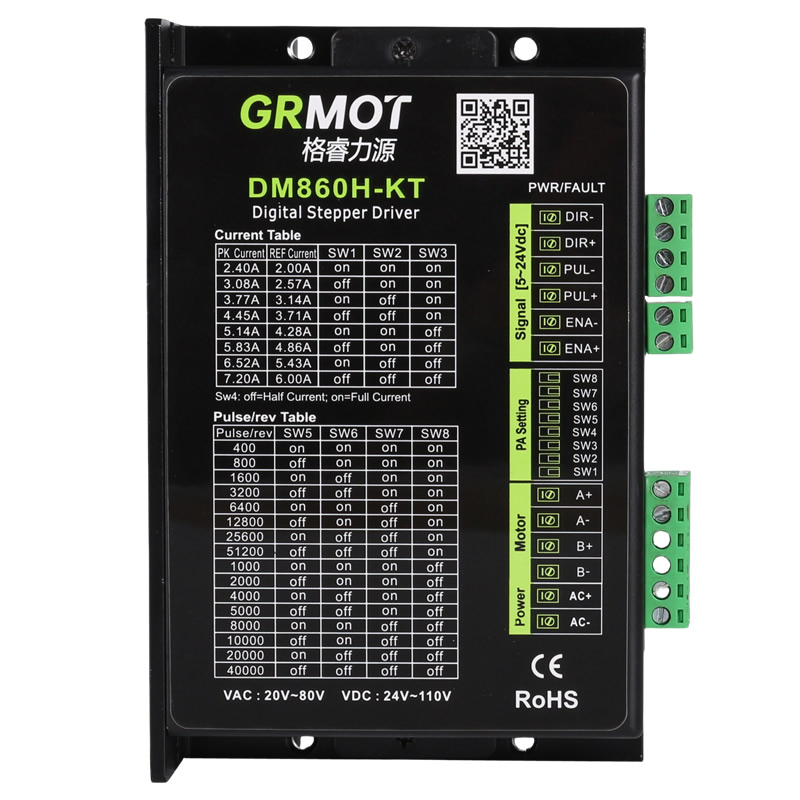
| DM860H-KT | 2-phase | 2.4~7.2 | AC(20~80)/DC(24~110) | 143*97*48 | 57/60/86/110 |

GRMOT's Technical Parameters of 2-Phase Motor Drivers and Compatible Motors
| Model | Number of Phases | Current (A) | Voltage (V) | Dimensions (mm) | Match motor Flange(mm) |
| DM422 | 2-phase | 0.5~2.2 | DC(12~40) | 86*55*22 | 20/28/35/42 |
| DM542 | 2-phase | 1.0~4.2 | DC(20~50) | 111*76*33 | 42/57/60/86(86-65&86-80) |
| DM556 | 2-phase | 1.4~5.6 | DC(20~50) | 111*76*33 | 42/57/60/86(86-65&86-80) |
| DMA872S | 2-phase | 2.1~7.2 | AC(18~55)/DC(24~80) | 109*70.26.5 | 57/60/86 |
| DM860H-KT | 2-phase | 2.4~7.2 | AC(20~80)/DC(24~110) | 143*97*48 | 57/60/86/110 |
 Company Profile
Company Profile